word
MarkovモデルからPFDを導出する方法
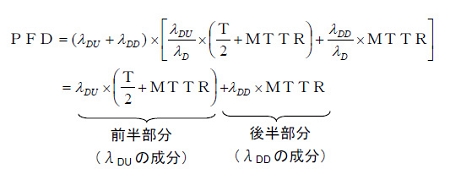
- PFDaveの計算式には、λ DU の成分つまり定期検査をして判明する危険側故障と、λ DD つまり故障したらすぐに修理にとりかかれる故障の2つの成分から出来ていましたね。ここでは、それぞれのMarkovモデルを考え、IEC-61508に掲載されているPFDaveの計算式がどのように導かれるのかのサンプルをご紹介します。
- これは著者の同僚が作成した導出モデルです。

- 時刻 t において、健全な状態の確率をP(t)とします。つぎに、『実は壊れていて適切に動作できないけれど検知できないため修理することが出来ずそのままにされている状態』、これを潜在的な故障状態といいますが、この状態にある確率をF(t)とします。同様に定期検査のおかげで故障が判明し、修理中の状態にある確率をR(t)とします。

- 毎回の定期検査周期である時刻 T において、潜在故障状態のものは全て点検され、故障が判明するとすれば、F(T-)は、R(T+)に加えられ、F(T+)は、ゼロリセットします。同様に、R(T-)は、R(T+)においてF(T-)だけ加えられます。(T-とは時刻Tのぎりぎり直前。T+とは時刻Tのぎりぎり直後を表すものとします。)
- このように、F(t)からR(t)への遷移は、図の点線のように繰返し発生するデルタ関数のようなδ(t-nT)のように移動するというイメージです。
- 時刻 t =nT の度にこのような、FからRへの移動が発生しますが、検査サイクル Tを何度も何度も繰り返した定常状態になると、次のような関係式が成り立つと考えられます。

- すなわちインターバル Tの間に、健全な状態から潜在故障状態にゼロから累積していった量は、同じ期間 Tの間に、修理中状態から健全状態に復帰した量に等しくなる、の意味です。この関係は後ほど使用します。
- さて、先ほどの図を微分方程式で表現してみます。
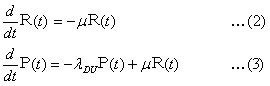
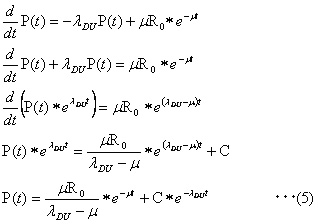
- (2)の式を解くと次のようになります。

- (4)を(3)に代入して、P(t)を求めましょう。
- 定期検査をしたぎりぎり直後 t =( nT +)では、潜在故障状態F(nT+)=0ですから、状態はPとRの2つしかありません。全体の状態の場合の数は「1」ですから、

- これは周期Tごとの初期値と言えますから、
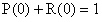
- といえます。
- これを上記(4)(5)の式で、t=0のときの関係として使うと以下のようになります。
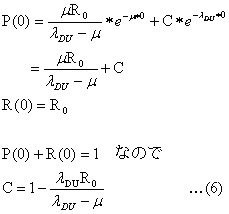
- これでCが求まりましたので、以下のようになります。

- (4)と(7)の式は、共にRoが求められていません。これは後に回します。
- 先にF(t)がどのような式になるか考えてみましょう。
- 最初のMarkovモデルを見ていただくと、健全なP(t)から故障率λDUだけF(t)は変化しますから、次のような式になります。
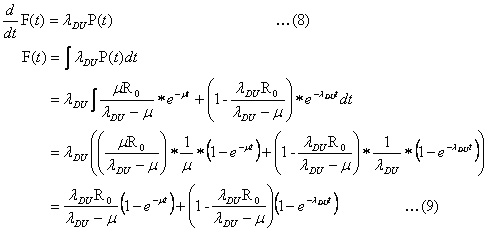
- これでRoを残して、P(t)、R(t)、F(t)が以下のように求まりました。
- ここで「a」が十分に小さいときには以下のようにかけることを利用します。

- 今回でてくる検知不可能な危険側故障率λ DU 、および修理率μは、十分に小さな値ですので、前述の(11)と(12)式をこの関係を使って、簡略化します。

- ここで、最初に登場した(1)の関係を使用します。

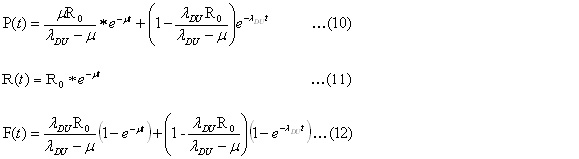
- これを(13)、(14)に代入します。

- これを(14)に代入し、F(t)を求めてみます。

- 今度は前半ほど複雑ではありません。時刻 t において、健全な状態をP(t)、故障状態は修理中も含めてR(t)と表現できます。今回は検知可能な故障ですから、故障が発生したらすぐに修理できますので、R(t)=1-P(t)と表現することが出来ます。
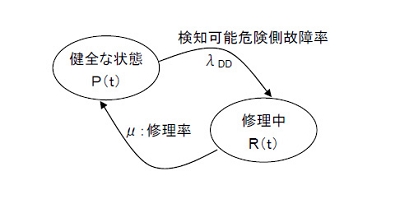
- つまり時刻 t から t+dt の間に、P(t)×λ DD ×dtだけ故障し修理中のR(t)に向かい、その一方、R(t)×μ×dtが修理を終えて戻ってきます。これを式に表します。
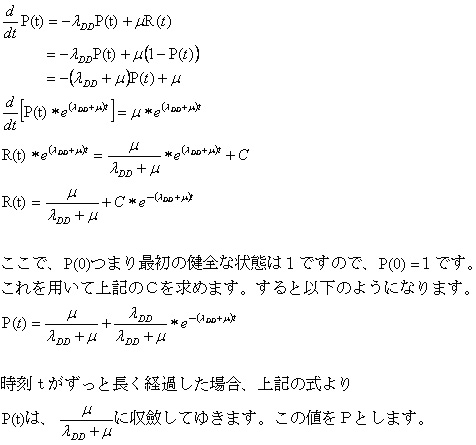
- λ DD とは、1/MTBFと表されます。また前述と同様にμは、1/MTTRと表されます。これを整理すると次のようになります。
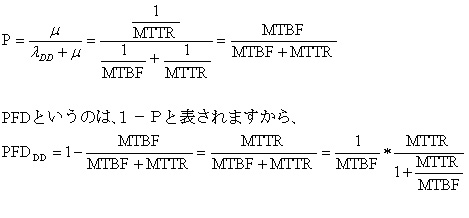
- ここで、MTBF>>MTTRと考えると
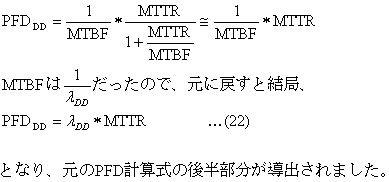
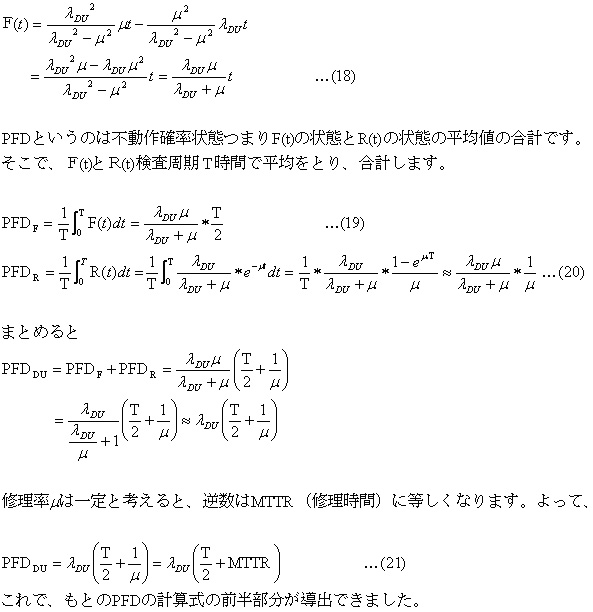
- (3)前半部分と後半部分を合計し、全体のPFDを求める。
- これまでの(21)式と、(22)式から、それぞれ故障が検知できない部分と、検知できる部分のPFDが計算できました。これを合計すると、IEC-61508に掲載されている計算式となります。
